- 土木技術
-
インフラ
Tunnel-Rover
⾃律⾛⾏式⽔路トンネル調査ロボット

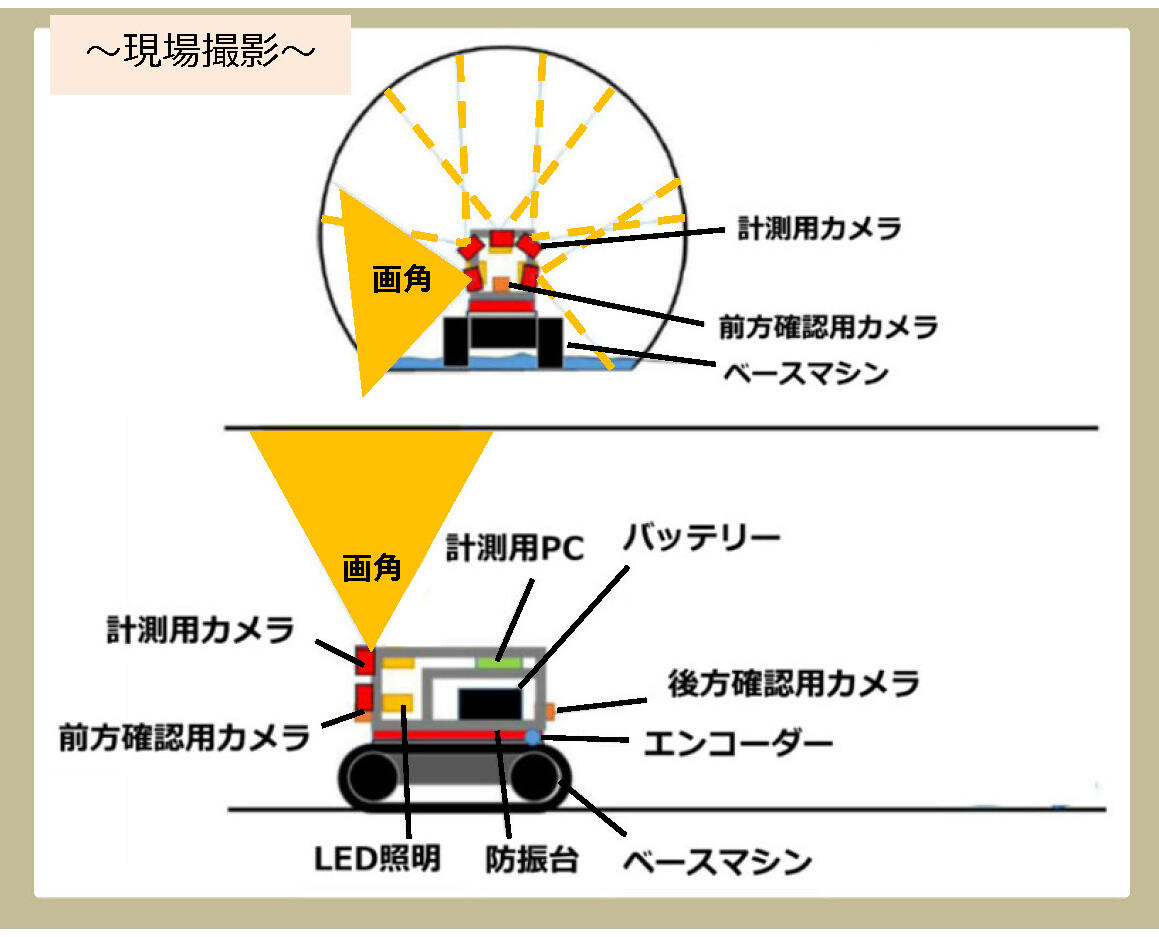
現場撮影
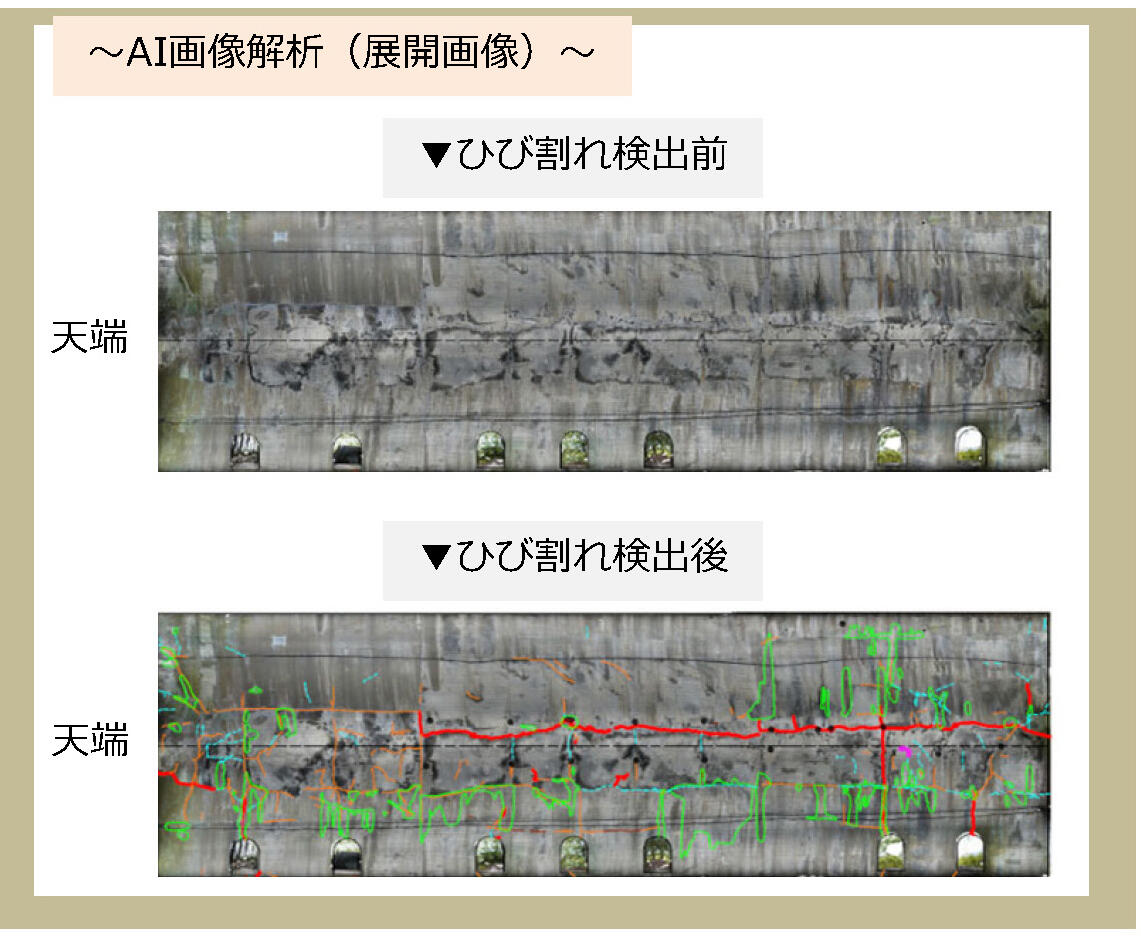
AI画像解析(展開画像)
概要
Tunnel-Rover※1は、主に⼩断⾯の⽔路トンネル⽬視調査の省⼒化・効率化を⽬指して開発※2した、⾃律⾛⾏型の調査ロボットです。LiDAR等のセンサを搭載したクローラ⾛⾏部をベースとして、⾼解像度のカメラやLED照明などを搭載し、センサによってトンネル内の中央部を維持しながら⾃律⾛⾏するとともに、坑内壁⾯の⾼精細な画像を取得することができます。さらに、取得した画像から、AIを活⽤した画像解析ソフトによってひび割れの⾃動検出が可能です。
特徴
■本装置を⽤いることで、点検者による近接⽬視点検の負担低減や省⼈・効率化が図れます
■トンネル壁⾯全体を撮影し、点検者では観察しにくい箇所も確認できます
■電⼦データ※3による調査結果の記録・蓄積によって、結果の⽐較・経時的変化の把握が可能です
※1 「Tunnel-Rover」は商標登録出願中です。
※2 ⾃律⾛⾏式⽔路トンネル調査ロボットは、佐賀⼤学(伊藤研究室)との共同開発です。
※3 数値データおよび図⾯データの⽣成が可能です。