計測用装置の自動運転化を実現
お知らせ2023年09月13日
-山岳トンネル工事における建設機械の自動化に着手-
当社は、株式会社アラヤ(東京都千代田区、社長:金井良太)と共同で、計測用装置『Tunnel RemOS-Meas.(トンネルリモスメジャー)』※1の自動運転化を実現しました。当社では山岳トンネル施工の切羽作業の無人化を実現すべく、各種建設機械の遠隔化・自動化技術『Tunnel RemOS(トンネルリモス)』の構築を進めており、これまでに開発した遠隔化技術をベースに自動化技術の開発も進めています。
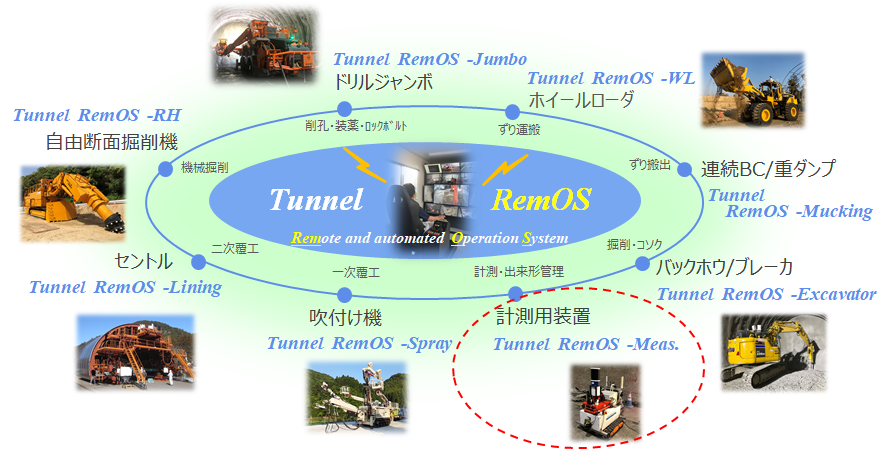 山岳トンネル無人化施工システム『Tunnel RemOS』の構想
山岳トンネル無人化施工システム『Tunnel RemOS』の構想
(『Tunnel RemOS』はTunnel Remote and automated Operation Systemの略称)
■背景
山岳トンネルの施工では、切羽における岩盤の崩落事故に対する安全性向上や若手入職者の減少による労働力不足に対する生産性向上が課題となっています。この対策の1つとして、特に過酷な環境下である切羽近傍で従事する現場技術者や作業員の立ち入りを不要とする切羽作業の無人化(建設機械の遠隔化・自動化)が求められています。
このような背景から、西松建設では山岳トンネルの施工に使用する各種建設機械の遠隔化・自動化技術『Tunnel RemOS(トンネルリモス)』の構築を進めています。これまでは、切羽から離れた場所より建設機械を遠隔操作する“遠隔化“技術を中心に開発を進め、全要素技術の遠隔操作の現場実証を開始しました。今回からは更に、遠隔化技術をベースにしてAIやSLAM※2等の制御により自動で建設機械を稼働させる“自動化”技術の開発にも着手しています。
そしてこの度、自動化技術の開発の第一歩として、山岳トンネル工事の計測作業を遠隔操作で行うための装置『Tunnel RemOS-Meas.(トンネルリモスメジャー)』の自動運転化技術の開発や現場試行を行いました。これにより、駐機場所から切羽までの装置の移動が自動化されるため、これまでに必要とされていたタブレットによる遠隔操作が不要となります。
■概要
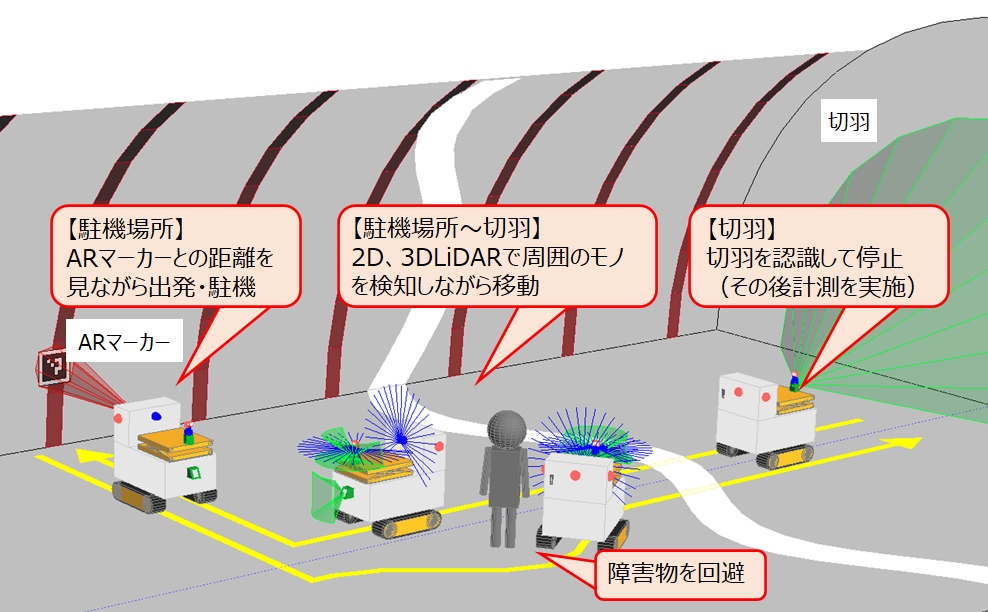
今回開発した自動運転化技術は、SLAMにより駐機場所と切羽の間の装置の移動を自動化します。
計測用の装置には複数のLiDAR※3やカメラ、制御用PCを搭載しています。LiDARで取得したトンネル壁面や周辺環境の点群データを基に、制御用PC内のSLAMソフトで自己位置の推定を行い、側壁と一定の距離を保ちながら駐機場所と切羽の間を自動運転します。また、周囲の建設機械や人、切羽等もLiDARで検知するため、障害物との衝突の危険性を察知し停止・回避するだけでなく、ゴールとなる切羽地点への到着・停止も可能です。駐機場所においては、事前に設置したARマーカーをカメラで視認することで、良好な精度で駐機・出発を行います。なお、装置の走行や計測作業はタブレットを用いた遠隔操作による制御を基本とし、画面上で設定を切り替えて自動運転を行います。
切羽写真の撮影等、日々行われる定常的な計測作業の際に自動運転を活用することで、装置の移動操作が不要となり、労働生産性の向上が見込まれます。また、今後は本開発のノウハウを他の各種建設機械の自動化に活用することで、切羽作業の無人化の早期実現が期待されます。
 計測用装置の自動運転の概要
計測用装置の自動運転の概要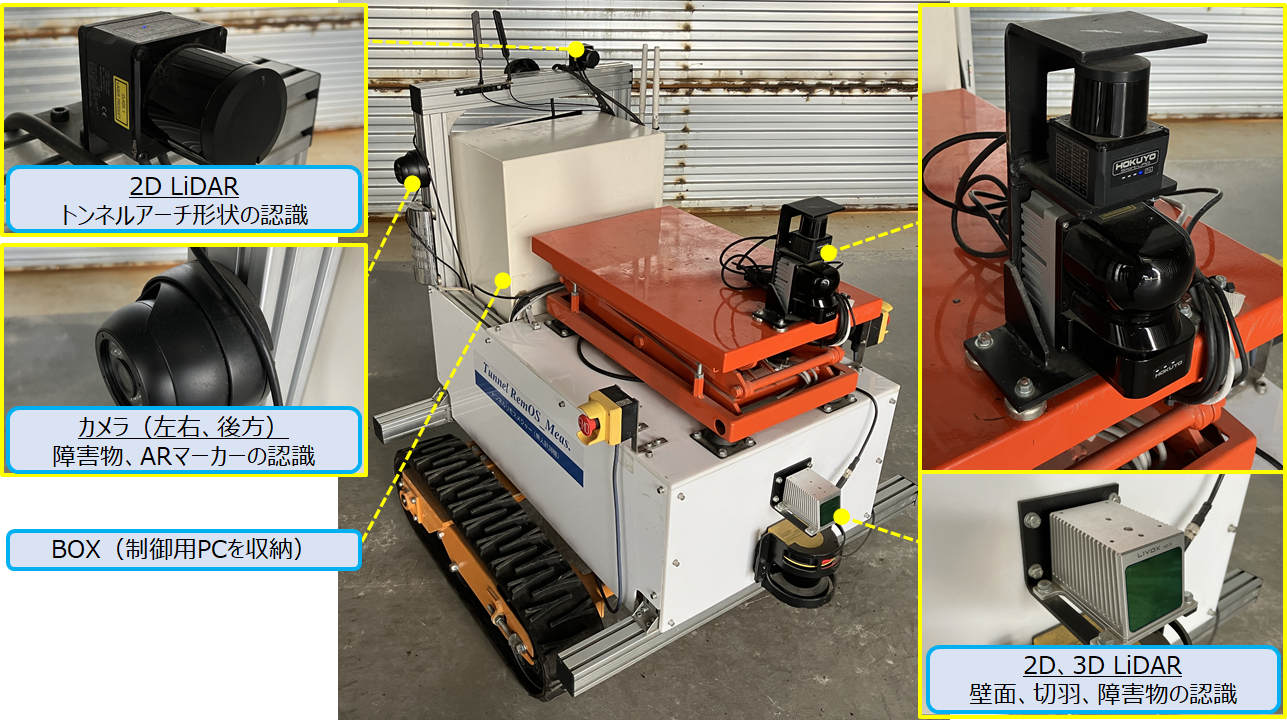
計測用装置への搭載機器
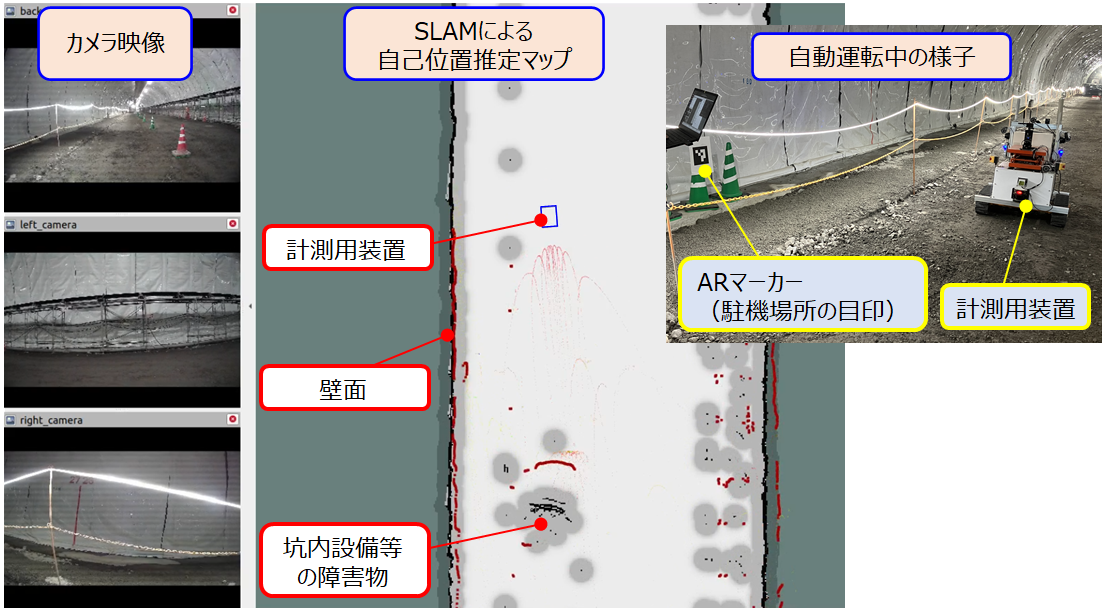
SLAMによる取得データの例と自動運転中の様子
【動画:https://youtu.be/Ws6CO53fUis】
■今後の展開
今後は、実験ヤードや現場での試行を重ねることで、開発した自動運転化技術を継続的に改良していくとともに、切羽写真の撮影等、切羽における計測作業全般の自動化を目指します。また、本開発の知見を活かして『Tunnel RemOS』の他要素技術の自動化も進めることで、切羽作業の無人化の早期実現を目指します。
■補足
※1 カメラによる切羽写真の撮影やスキャナによる出来形計測といった切羽近傍における計測作業を遠隔化するために、西松建設株式会社とジオマシンエンジニアリング株式会社が開発した装置です。
山岳トンネル工事における計測作業を遠隔で行う『Tunnel RemOS-Meas.(トンネルリモスメジャー)』を開発-トンネル切羽近傍の計測作業の無人化-(2021年5月19日ニュースリリース)
※2 SLAM(Simultaneous Localization And Mapping):距離センサやカメラで取得したデータを基にして、自身の位置の推定(Localization)と地図の作成(Mapping)を同時に(Simultaneous)行う技術です。配膳ロボットや掃除ロボット等に用いられます。
※3 LiDAR(Light Detection And Ranging):レーザー光を照射し、物体に当たって跳ね返ってくるまでの時間を基にして、物体との距離、方向、性質等を測定する技術です。自動運転等に用いられます。