トンネル坑内における油圧ショベルの無線遠隔操作システム
「Tunnel RemOS-Excavator」を開発
お知らせ2023年01月10日
-山岳トンネル無人化施工システム『Tunnel RemOS』の全要素技術が現場実証開始-
当社は、ジオマシンエンジニアリング株式会社(東京都荒川区、社長:塚田純一)と共同で山岳トンネル施工に用いる油圧ショベルの一連の作業を無人化する『Tunnel RemOS-Excavator(トンネルリモスエクスカベータ)」の開発や実証確認を行いました。
当社では、かねてより山岳トンネルの切羽作業の無人化に向けて、主要施工重機の遠隔操作技術・自動化技術を組み合わせた山岳トンネル無人化施工システム『Tunnel RemOS(トンネルリモス)』の開発を進めています(図1参照)。今回は、その中の油圧ショベルの遠隔操作システムを開発し、現場にて油圧ブレーカの切羽への移動や切羽作業(コソク作業)といった一連の作業の遠隔操作を実証確認しました。
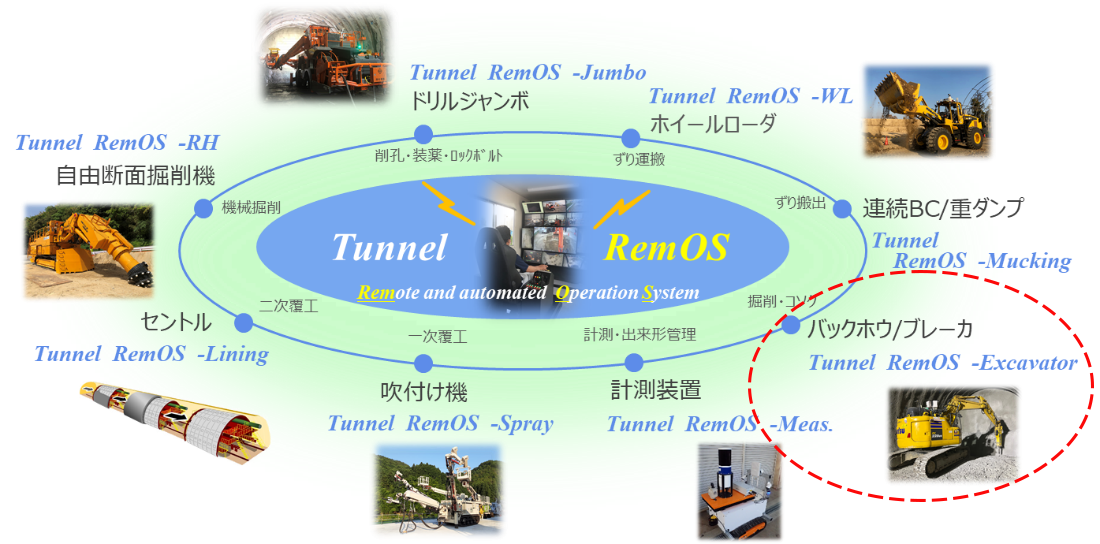
図1 山岳トンネル無人化施工システム『Tunnel RemOS』の構想
■ 開発の背景
建設業では、高齢者の大量離職や若手入職者の減少によって、将来的に労働力の不足が懸念されます。また、山岳トンネル工事では切羽における肌落ち災害がたびたび発生しており、作業員が切羽に立ち入る機会を減らすことが課題となっています。
このような背景から、当社ではトンネル施工重機の無人化技術の開発に取り組んでいます。今回実証確認を行ったバックホウやブレーカなどの油圧ショベルは、切羽の掘削、ずりの積み込み、コソクおよびあたり取り等多くの場面で用いられることから、無人化による安全性向上や省人化等の効果が大いに期待されます。
■ システムの概要
今回開発した油圧ショベル遠隔操作システム『Tunnel RemOS-Excavator』により、油圧ブレーカの走行から切羽でのコソクやあたり取りなどの一連の作業を無線で遠隔操作することが可能になります。
切羽から離れた位置に配置された遠隔操作室には、走行や打撃のためのペダルや油圧ブレーカのブーム、アームの動作、機体の旋回等を行うためのレバーを備えたコクピットや、映像を映すためのモニタが設置されており、切羽近傍の映像、音、振動を体感しながら実機に近い感覚で油圧ブレーカを遠隔操作することができます。また、切羽作業に合わせて設定を切り替えることで、共通の設備を用いて他の重機も遠隔操作することが可能です。
油圧ブレーカには、遠隔操作室からの操作信号に基づいて機体を制御するための機体制御盤や、機体の周囲や切羽を映すための複数のフルHD カメラを搭載しています。また、遠隔操作室からの操作信号や機体側で取得された各種データは、坑内と機体に設置した無線通信設備によって伝送されるため、無線での遠隔操作が可能となっています。
また、切羽あたり取り時のガイダンスシステムとして、『切羽掘削形状モニタリングシステム』を装備しています。本システムは、重機に搭載した高速3D スキャナで切羽の掘削形状を計測して、掘削形状の点群データと設計断面を比較し、設計断面線よりも内空側に残ったあたり箇所を重機キャビン内のモニタにヒートマップ表示させることで、遠隔操作室にいながら切羽のあたり箇所の確認が可能となります。
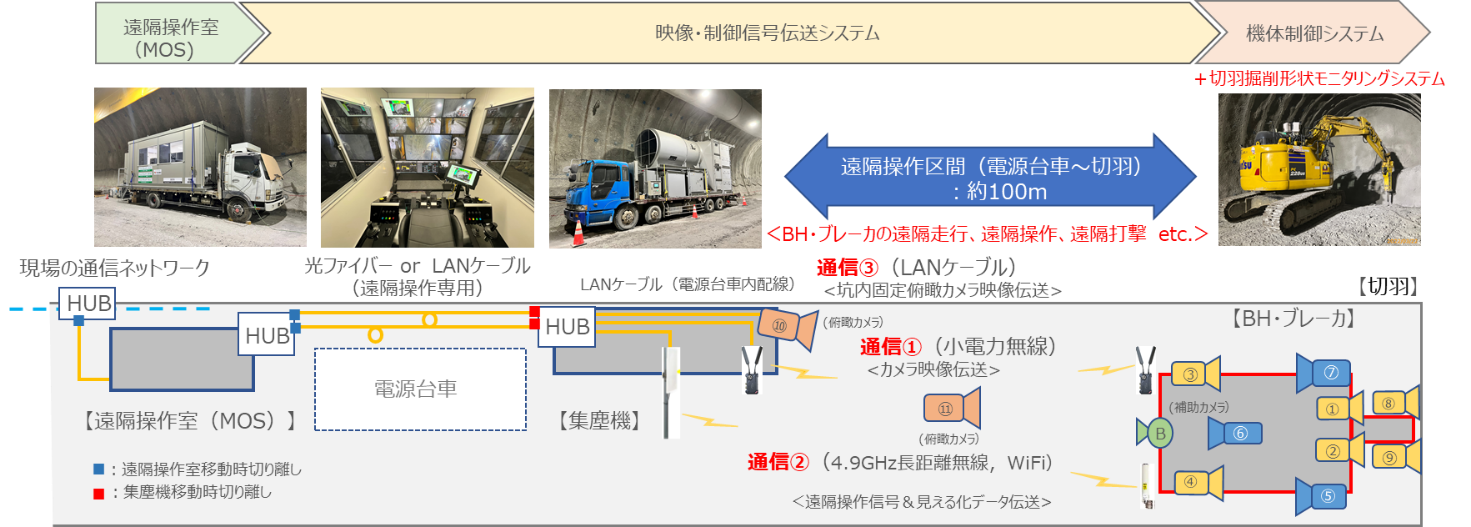
図2 『Tunnel RemOS-Excavator』のシステム構成例
本システムの特長を以下にまとめます。
●安全性の向上
遠隔操作室から油圧ブレーカのすべての操作を行うことで切羽が無人となり、飛び石や切羽崩落による人的被害が無くなります。また、「切羽掘削形状モニタリングシステム」を搭載することで、あたり箇所の確認に切羽直下に立入ることも無くなるため安全性が向上します。
●作業環境の改善
油圧ブレーカによる掘削作業は振動、騒音、粉じんおよび飛び石の飛来等オペレータにとって苦渋な環境ですが、遠隔操作室は切羽から離れている上に空調が完備されており、快適な作業環境でトンネル掘削を施工することが可能です。
●高い視認性と低遅延
現場検証を通じて、カメラの台数や配置の工夫、無線伝送技術の選定を行うことで、遠隔操作をするために必要な高い視認性と低遅延を実現しています。
●汎用性
本システムは重機メーカー問わず後付けが可能なため、汎用性の高いシステムです。
■ 実証試験の状況と今後の展開
鉄道建設・運輸施設整備支援機構北海道新幹線建設局発注の「北海道新幹線、磐石トンネル(北)他工事」にて実証試験を行った結果、施工に影響を及ぼす通信上の不具合は生じず、油圧ブレーカによる一連の作業を無線で遠隔操作可能であることを確認しました。今後は、油圧バックホウやホイールローダとの共同作業を遠隔・自動化させたトンネル掘削作業の完全無人化への取り組みを続け、更なる安全性向上・省人化を目指していきます。
今回開発した油圧ショベル遠隔操作システム「Tunnel RemOS–Excavator」は、当社が開発を進めている山岳トンネル無人化施工システム『Tunnel RemOS』の取り組みの一つであり、これにより『Tunnel RemOS』全要素技術の現場実証を開始しました(図1参照)。各技術の実証試験を2023年度までに完了する計画であり、2027年度までの実用化を目指して取り組みを続けていきます。

図3 遠隔操作室

図4 コクピットとモニタ(遠隔操作室内)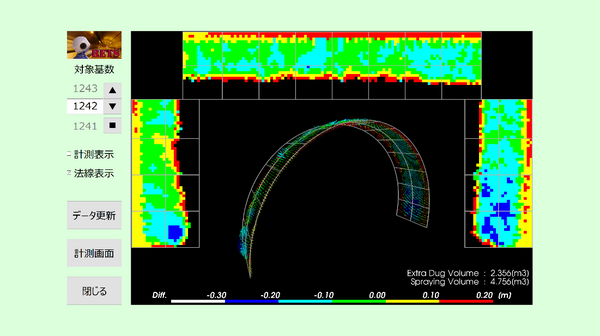 図5 あたり箇所のヒートマップ表示(切羽掘削形状モニタリングシステム)
図5 あたり箇所のヒートマップ表示(切羽掘削形状モニタリングシステム)
図6 遠隔操作中の油圧ブレーカ