国内初 トンネル坑内においてローカル5Gを使用したホイールローダの遠隔操縦を試行 -28GHz帯のローカル5G通信を山岳トンネルへ国内初適用-
お知らせ2021年10月08日
当社は、株式会社カナモト(北海道札幌市中央区 社長:金本哲男)と有限会社浅草ギ研(千葉県いすみ市 代表取締役:石井孝佳)、ジオマシンエンジニアリング株式会社(東京都荒川区 社長:塚田純一)と共同で、山岳トンネル掘削時のずり運搬に使用されるホイールローダ※1をローカル5G通信により遠隔操縦させるシステムを開発し、トンネル坑内において遠隔施工実証実験を行いました。28GHz帯のローカル5G通信を山岳トンネル坑内へ適用したのは、今回が国内初となります。
ローカル5G通信については、多数同時接続や大容量通信を利用してトンネル掘削に使用する複数重機の遠隔同時施工への応用も期待されており、今回の開発を足掛かりにトンネル工事の無人化施工の実現に向けて取り組みを加速させていきます。
なお、本技術は、官民研究開発投資拡大プログラム(PRISM)予算を活用して国土交通省が実施する『建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト』に選定されています。
■背景
我が国における労働人口減少の流れは今後さらに加速するとされており、建設業においても施工の省人化・無人化への取組みは喫緊の課題となっています。このような状況の中、狭隘な空間において複数の特殊重機による複雑な作業が必要な山岳トンネル工事においても、自動化・無人化技術の開発を推進させていく必要があります。
このような背景から、西松建設ではトンネル施工の各作業における無人化(遠隔操作)・自動化施工に関する要素技術の開発を進めており、ホイールローダ遠隔操作システムもその取り組みの一つとなっています。
―――――――――――――――――――
※1:ホイールローダ(Wheel Loader:WL)
岩石や土砂をダンプカーやベルトコンベア等の運搬機械(設備)に積み込む車両系建設機械です。トンネル掘削では、発破等により切羽で発生した掘削ずりを切羽から坑外搬出機械(設備)までの比較的短距離(最大100m程度)の運搬作業に使用されます。
―――――――――――――――――――
■概要
ローカル5G(以降、L5G)を使用したホイールローダ遠隔操作システムは、『遠隔操作システム』、『映像・制御信号通信システム』および『安全走行管理システム』で構成されます(図1)。
①遠隔操作システム
本システムは運転操作に必要な装置で構成されています。ホイールローダの運転操作は、ステアリング、ブレーキ・アクセルペダルおよびアーム・バケットレバーの操作によって行われますが、これらの操作を無線受信により機械的に作動させるための遠隔運転制御装置がホイールローダに外付けされています(写真1)。また、遠隔操作室には、実機と同じ仕様の遠隔操作コクピット(以降、コクピット)および9画面のモニターが配置されており、この画面を見ながらコクピットから遠隔操作を行います(写真2)。さらに運転時の実機振動や作動音もコクピットに伝わるようにしており、実機運転とほぼ同じ環境下での遠隔運転が可能となっています。
②映像・制御信号通信システム
本システムは遠隔操作に必要な映像・制御信号をL5Gで通信させる装置で構成されます。ホイールローダには、7台のフルHD車載カメラ(前後進時にそれぞれ5台使用)および5G端末、制御盤等で構成される「ホイールローダ搭載ユニット」が設置されています(写真3)。また、写真4のようなL5Gアンテナを高所作業車に設置したL5G分離型移動基地局や坑内カメラ等で構成される「坑内固定ユニット」を切羽後方に配置しました。遠隔操作時における車載カメラの高精細映像データは、WL搭載ユニットの5G端末から坑内固定ユニットのL5G分離型移動基地局へ無線伝送され、そこから光ファイバケーブルを介して遠隔操作室へ有線伝送されます(図1参照)。同時に、遠隔操作信号は同様の通信設備を使用して遠隔操作室からホイールローダに伝送されます。
③安全走行管理システム
遠隔操作時の安全走行を確保するため、ホイールローダの運転を自動的に緊急停止させるシステムを備えています。緊急停止は、ホイールローダへの人の異常接近をAIが認識した場合や無線にトラブルが発生した際に自動的に作動しますが,コクピットや携帯式のスイッチから手動で緊急停止を作動させることもできます。また、ホイールローダ周辺の安全状況や坑内設備との接近は、遠隔操作室に設置された全周囲モニターによって確認することもできます。
■トンネル現場における遠隔施工実証実験
開発技術の実証実験を国土交通省北海道開発局小樽開発建設部発注の「一般国道5号 仁木町外 新稲穂トンネルR側仁木工区工事」において行いました。実験では、ホイールローダによる坑内走行、掘削ずりの運搬やクラッシャーへの投入といった実施工と同様の作業を遠隔操作で実施しました(写真5)。
今回の実証実験において、運転操作に大きく影響するような映像伝送遅延や通信上の不具合は生じず、狭隘な坑内においても有人運転に近い高速走行(時速20km/h程度)や掘削ずりの積み込みやクラッシャー投入時の微妙なバケット操作を遠隔で実施することができました。
■今後の展開
開発したシステムについては今後も現場試行を継続しながら改良を加え、本システムの早期実用化を目指します。
また西松建設では、本システムをはじめとした山岳トンネル施工に使用する各重機の無人化技術を効果的に組み合わせた“山岳トンネル無人化施工システム「Tunnel RemOS(トンネルリモス)」”の構築を急ピッチで進めており(図2)、トンネル掘削作業の完全無人化の早期実現を目指して取組みを続けていきます。
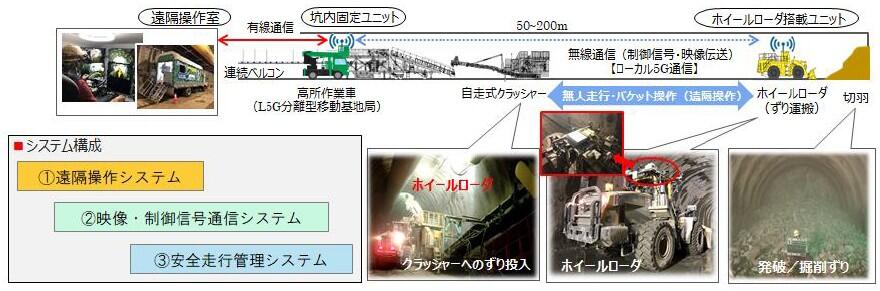 図1 システムの概要
図1 システムの概要
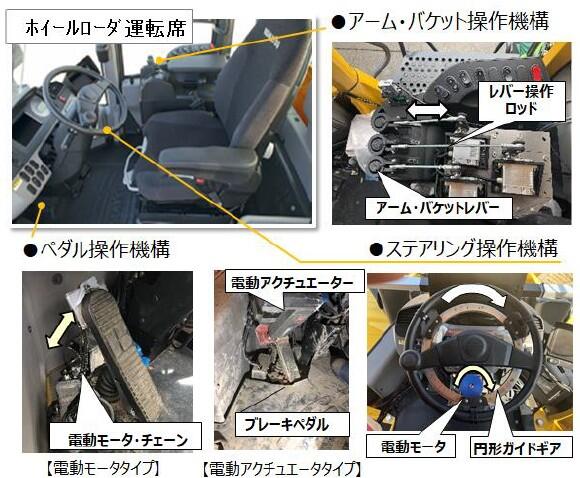 写真1 遠隔操作システム(遠隔運転制御装置)
写真1 遠隔操作システム(遠隔運転制御装置)
 写真2 遠隔操作システム(遠隔操作室・コクピット)
写真2 遠隔操作システム(遠隔操作室・コクピット)
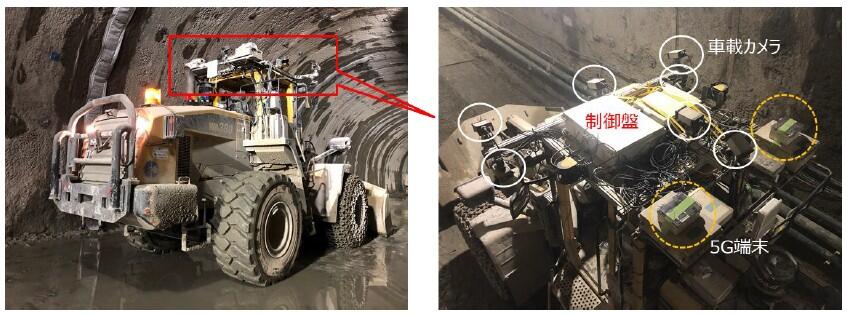 写真3 映像・制御信号通信システム(ホイールローダ搭載ユニット)
写真3 映像・制御信号通信システム(ホイールローダ搭載ユニット)
 写真4 ローカル5G分離型移動基地局(坑内固定ユニット)
写真4 ローカル5G分離型移動基地局(坑内固定ユニット)
 写真5 遠隔施工(無人化施工)実証実験状況
写真5 遠隔施工(無人化施工)実証実験状況
 図2 山岳トンネル無人化施工システムの概要
図2 山岳トンネル無人化施工システムの概要