GNSS測位技術を活用したケーブルクレーン自動運転システムを開発 -ダム建設工事 堤体工での試験運用を開始-
お知らせ2021年03月31日
当社は、ダム現場におけるコンクリート打設の作業時間の短縮を可能とする、「ケーブルクレーン自動運転システム」を開発しました。
本システムは、コンクリート打設作業の際に都度遷移する打設位置や、バケット積載重量の変化に応じて、運搬の軌道や速度を変化させ、最適化された自動運転を実現します。打設位置へ高精度に到達し、バケットの振れを自動で抑えることが可能であり、柱状打設へ適用した場合には、クレーン運転士が目視確認できない箇所においても安全かつ迅速にバケットを到達、開放できるため、作業時間の短縮、堤体工の生産性向上を実現します。
本システムは、国土交通省 九州地方整備局発注の立野ダム建設(一期)工事において、3月より堤体工での試験運用を開始しております。
■背景
我が国における労働人口の減少の流れは今後さらに加速するとされており、特に建設業における施工の省人化、無人化への取り組みは喫緊の課題となっています。このような状況の中で、当社はダム堤体工における生産性向上、CIMやICT技術を活用・組み合わせる「i-Construction」の実現を目指しており、その一環として、ケーブルクレーンを使用したコンクリート打設の自動化技術開発に取り組みました。
■システムの概要
本システムは、準天頂衛星「みちびき」などのGNSSから受信した信号を利用してコンクリートバケットの位置を測位、ダム堤体CIMデータと連携させ、目標位置となる打設点までの運搬を自動制御する高精度なシステムで、以下のアプリケーションで構成されます。
①堤体打設オペレーティングモード
タブレット端末を使用して、自動運転の目標位置となるコンクリート打設点を指定
②自動運転モード
指定された打設点に向けて、ケーブルクレーンがコンクリートバケットを自動で運搬
③統合管理ディスプレイ
打設状況を事務所からリアルタイムで確認、各種打設データの蓄積と管理
■システムの特徴
システムは3つのアプリケーションで構成され、それぞれ特徴を有しています。
①堤体打設オペレーティングモード
・タッチパネル上に表示されたダム堤体の平面図上で次の打設点となる位置を指示
・ダム堤体CIMモデルの位置情報を活用し、打設点毎の3次元座標データの入力作業の省略、誤入力を防止
②自動運転モード
・GNSS測位によりバケット位置を計測、目標位置(打設点)に向けて自動運転
・3次元空間上の絶対座標を用い、ワイヤの撓みなどを考慮せず、簡素化した制御プログラムで位置精度を確保
・測位データを0.1秒毎に計測することで、バケット振れの挙動をリアルタイムで取得
・バケット振れ角度及び、角速度を制御パラメータとして使用し、横行トロリを加減速する制御(状態フィードバック制御)をシステムに実装
・堤体打設のサイクルタイムを短縮(手動運転との比較で約10%のサイクルタイム短縮)、打設作業の生産性向上に寄与
③統合管理ディスプレイ
・デジタルサイネージによる打設状況のリアルタイム確認
・蓄積データをCIMモデル上に付与・表示させ、日々の打設データを管理し、共有
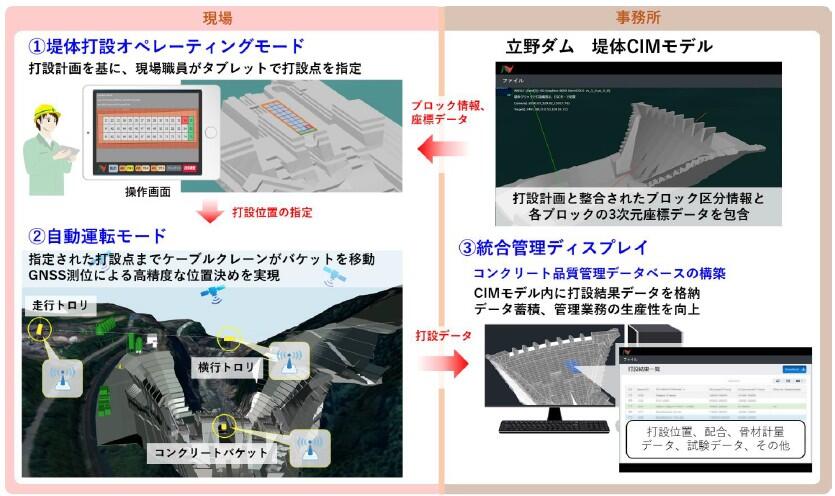
図-1 ケーブルクレーン自動運転システムの概要

写真-2 GNSS受信装置
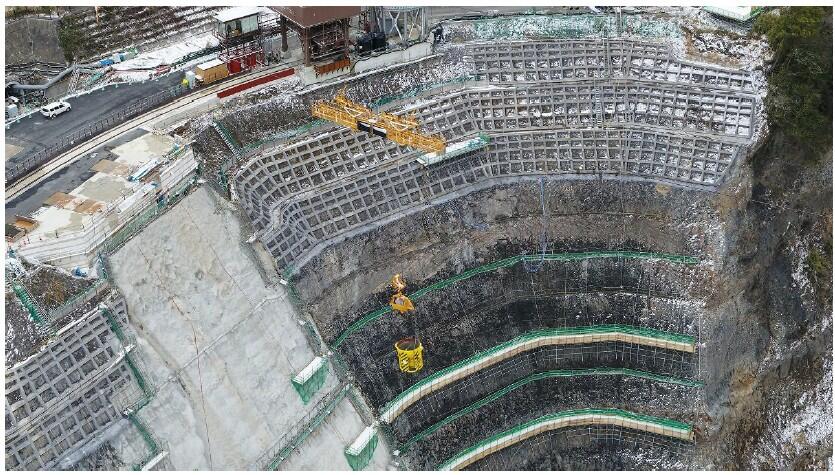
写真-3 ケーブルクレーンによるコンクリート打設
■今後の展開
立野ダム堤体工での試験運用を通してシステムの改良を進め、他のコンクリートダム工事へ展開することで、施工の省人化、無人化への取り組みを加速させていきます。