AIモデルを活用したシールドマシンの掘進方向制御の支援システムを開発
お知らせ2022年06月13日
熟練オペレータの技量を学習し掘進方向を推測、制御の自動化を目指す
当社は、熟練オペレータの操作技術などを数値化し、 シールドマシンの掘進方向制御を AIモデルで支援するシステムを開発し、国内のシールド工事現場に導入いたしました。
■ 背景
建設業界では、少子高齢化に伴う担い手不足 や熟練技能者の減少・不足が懸念され、品質向上・生産性向上と技術伝承が喫緊の課題となっています。 そこで、それらの解決を図り、詳細な技術伝承がなくてもシールドマシン操作を可能にする 手段として、AIとICTを融合した高度な機械化システムの技術開発に業界全体で取組んでいます。
シールド工事においては、ダム、山岳トンネル等の工事に比べ、 既に高度な情報化と機械化が進められているものの、 従来はシールドマシンの方位・傾斜角や土圧 といったデータを見ながら、 オペレータがジャッキ選択、ジャッキ速度といった掘進パラメータを調整していましたが、オペレーション技術は個人差もあり、暗黙知とされ、明確なルール定義が困難であったためシールドマシン制御の 全体的監視は、情報化が遅れている状況でした。
そこで当社では、独自開発しているNS BRAINs※を活用し、シールドマシンや関連設備等から掘削に関連する各種施工データやオペレータ操作のデータを集積 し、そのデータを AI モデルに事前学習させるシステムを開発しました。
本システムの導入により、掘削精度の向上(品質向上)、施工の効率化(生産性向上)を図るだけでなく、個人差があったオペレータの操作技術を数値化し、 AI モデルの学習を通じて踏襲します。そのため熟練者から細かい技術を学ばなくても操作を可能にしました。
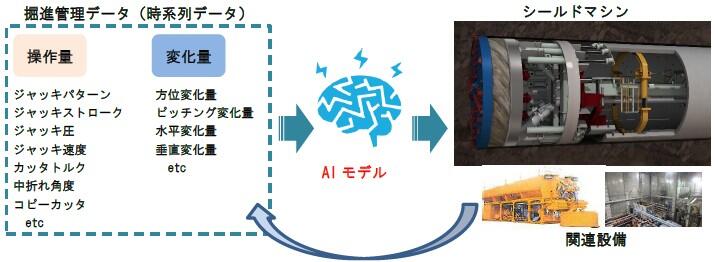 図1 システム概要
図1 システム概要
■ システム概要
今回開発したシステムは、シールドマシンの位置・姿勢(掘進方向や傾き)を計測・算出し、計画線形との偏差を正確に把握するだけでなく、オペレータの運転操作や掘進パラメータの全体的監視といった方向制御に関わる作業を中心に、AI モデルで支援します。
シールド工事において、シールドマシンが設計計画線に沿って掘削が出来ているか確認するため、実際の掘削線形を管理することは、施工管理上、最も重要な管理項目であり、工事の成否に大きくかかわります。
このシステムにより、人工知能が既往の熟練技能者の操作技術を、約50リングの間で学習することで、現場毎に最適化されたAIモデルを構築することが可能となり、施工条件等が類似した現場のモデルを応用することにより短期間で学習・適応させる事もできます。運転時には、このモデルを用いて計画線形との偏差を最小とする最適操作が探索され、これをオペレータに提示するので、熟練技術者に頼らない操作が可能です。またAI モデルによりより正確に掘進することができ施工現場での掘進方向の修正が減少し品質向上に繋がると考えます。
特長
① シールドマシンより取得した膨大な時系列データを学習したAI モデルを活用し、シールドマシンの掘削状況を把握するとともに、掘進管理データを基に、直後の掘進方向を瞬時に推測
② ジャッキ選択(ON/OFF)、ジャッキ圧力制御といった方向修正の方式に対応
③ AI モデルは、シールド工事の各種計測情報を総合的に一括管理するNS-BRAINs プラットフォームで動作するアプリとして、他のアプリ(線形管理、余掘り管理ほか)との連携も可能
■ 今後の展開
今後、本システムの運用により、シールド工事現場で、AI モデルに実証での掘進パラメータの変化を学習させながら、随時判断をさせて従来式との比較評価を行い、オペレータによる操作比重を下げ、掘進方向制御の自動化を進めてまいります。
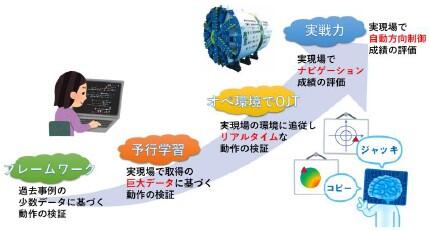 図2 AIモデル現場学習の概要
図2 AIモデル現場学習の概要
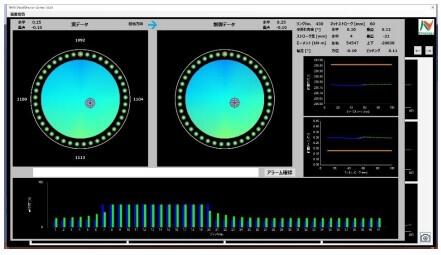 図3 システムUI例
図3 システムUI例
※『NS BRAINs』 (Nishimatsu Brain for Real Analysis Information System)System):シールド掘進中の様々な自動計測データを即時解析・活用して施工状況を客観的に解析・診断するシステム。