自由断面掘削機の遠隔操作システム「Tunnel RemOS - RH(トンネルリモス-RH)」を開発 -山岳トンネルにおける機械掘削作業の無人化へ-
お知らせ2022年02月24日
当社は、ジオマシンエンジニアリング株式会社(東京都荒川区 社長:塚田純一)と共同で、山岳トンネル無人化施工技術の1つである自由断面掘削機※1の遠隔操作システム「Tunnel RemOS - RH(トンネルリモス-RH)」を開発しました。このたび、実証実験において無人運転時の動作や操作性、安全性を確認しました。
このシステムでは、自由断面掘削機の走行やブーム操作といった切羽における掘削作業に必要な運転動作を車体に設置した複数のカメラ映像で確認しながら、ほぼ遅れなく無線で遠隔操作することができます。

遠隔操作実験状況
※1:自由断面掘削機(Roadheader:RH)
自由断面掘削機とは、ブーム先端のカッタの回転で地山を掘削する土木機械であり、ロードヘッダ、ブームヘッダ等の商品名で呼ばれることもあります。掘削時のブーム伸縮や上下左右への旋回により、任意のトンネル形状に掘削することができます。
■背景
我が国における労働人口の減少の流れは今後さらに加速すると予想されており、とくに建設業における施工の省人化・無人化への取組みは喫緊の課題となっています。このような状況の中、狭隘(きょうあい)な空間において複数の特殊重機による複雑な作業が必要な山岳トンネル工事においても、必要最低限の人員で生産性を向上させるために自動化や無人化技術の開発を推進していく必要があります。
■Tunnel RemOS(トンネルリモス)と期待できる効果について
このような背景から、西松建設では、切羽近傍の安全性向上と坑内作業人員の省人化を目的とし各施工機の無人化技術と、AIソリューショ ンを組み合わせた『Tunnel RemOS』の構築を進めており、2023年の実証実験完了、2027年の実用化を目指しています。
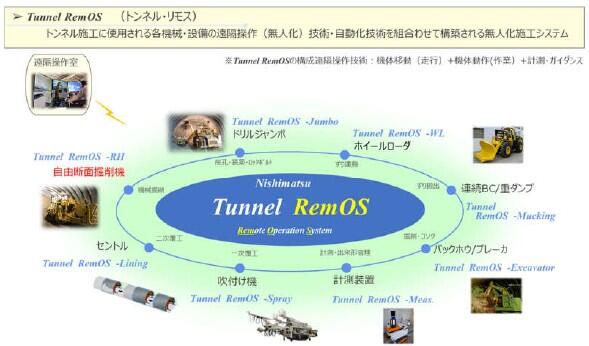
当社のトンネル・リモス構想
■Tunnel RemOS - RH(トンネルリモス-RH)概要
今回開発した自由断面掘削機遠隔操作システム「Tunnel RemOS– RH」は、『Tunnel RemOS』の取り組みの一つで、「Tunnel RemOS -WL」、「Tunnel RemOS -Meas」、「Tunnel RemOS-Lining」に続き4つ目の開発技術となります。本システムは『遠隔操作室』、『映像・操作信号通信システム』、『機体制御システム』および『掘削ガイダンスシステム』で構成されます。
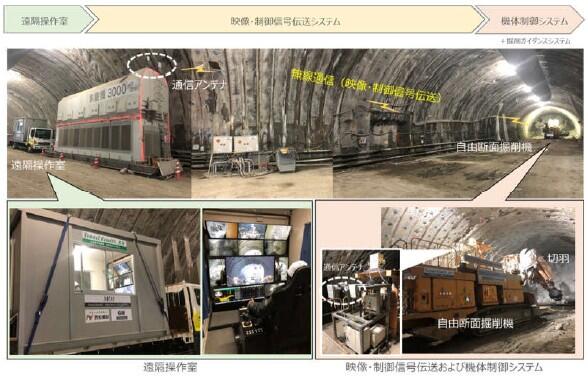
システムの構成
遠隔操作室
遠隔操作室内には遠隔操作コクピットおよびモニタが配置されており、このモニタ画面を見ながら機体走行やブーム操作等を遠隔で行います(写真 1〜写真 3)。なお、重機運転者にとって、重要な情報となる機体稼働音や掘削音(切削音)がコクピットに伝わるようにしています。
①映像・操作信号伝送システム
自由断面掘削機には9台のFHDカメラが設置されており、それらの映像データは坑内と機体に設置した無線通信アンテナによって無線で遠隔操作室に伝送されるとともに、操作信号が遠隔操作室から自由断面掘削機に伝送されます(写真 4)。同時に、機体姿勢、掘削位置(カッタ位置)やカッタトルク等の稼働データも遠隔操作室に伝送され、その情報の一部はコクピットモニタに表示されるとともに、専用PCに運転データとして蓄積されます(写真 3)。
②機体制御システム
遠隔操作室からの操作信号は、先述の映像・操作信号伝送システムを介して自由断面掘削機に設置された機体制御盤に伝送され、その信号をもとに機体が遠隔制御されます(写真 5)。
③掘削ガイダンスシステム
機体に取り付けられたセンサや3Dスキャナを使用してブーム先端(カッタ)の絶対座標を計算し、掘削切羽におけるカッタ位置が遠隔操作室モニタに表示されます(写真 3)。カメラ映像だけではわかりにくい奥行き方向の掘削状況については、このカッタ位置情報がとくに重要となります。
■トンネル現場における遠隔施工実証実験
本システムを用いた遠隔操作実験を国土交通省 九州地方整備局 長崎河川国道事務所発注の『長崎497号 松浦1号トンネル新設工事』において実施しました。実験では、自由断面掘削機の駐機場所から切羽までの坑内走行や切羽におけるブーム動作・カッタ回転、地山掘削といった実施工と同様の作業を遠隔操作で行いました。
今回の実証実験において、運転操作に大きく影響するような映像伝送遅延や通信上の不具合は生じず、実施工と同様のブーム操作ができることを確認することができました。
■今後の展開
開発したシステムについては今後も現場試行を継続しながら改良を加え、本システムの早期実用化を目指します。
また、当社では、山岳トンネル施工に使用する各重機の遠隔無人化・自動化技術を効果的に組み合わせた“山岳トンネル無人化施工システム(Tunnel RemOS)”の、各技術の実証実験を2023年度までに完了する計画であり、本技術もその構成技術に位置付けられています。これらの技術を用いて、トンネル掘削作業の完全無人化・自動化の早期実現を目指し取組みを続けていきます。

写真 1 遠隔操作室

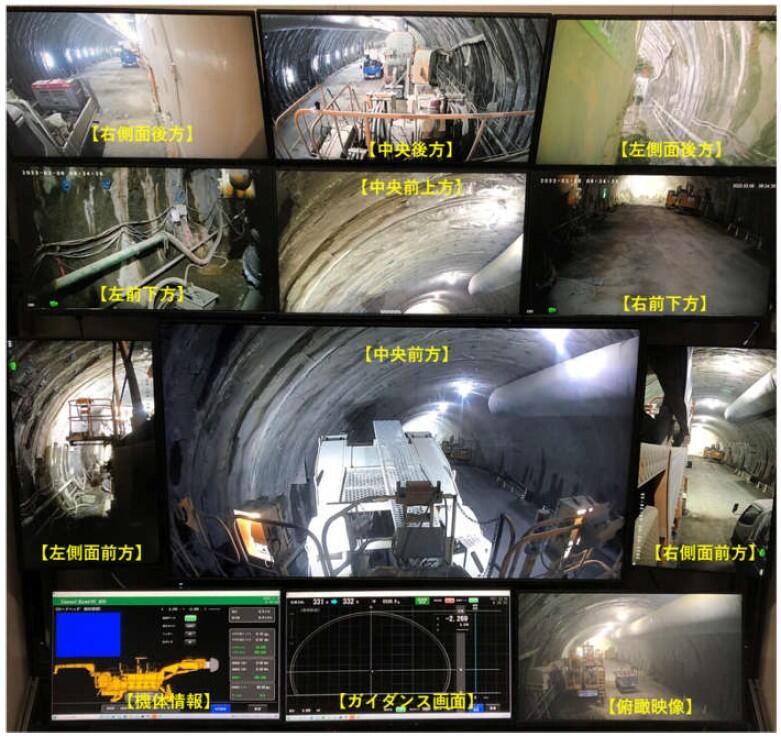
写真 3 遠隔操作用モニタ
 写真 4 映像・操作信号通信システム(通信アンテナ)
写真 4 映像・操作信号通信システム(通信アンテナ)
写真5 映像・操作信号通信および機体制御システム(自由断面掘削機搭載装置)